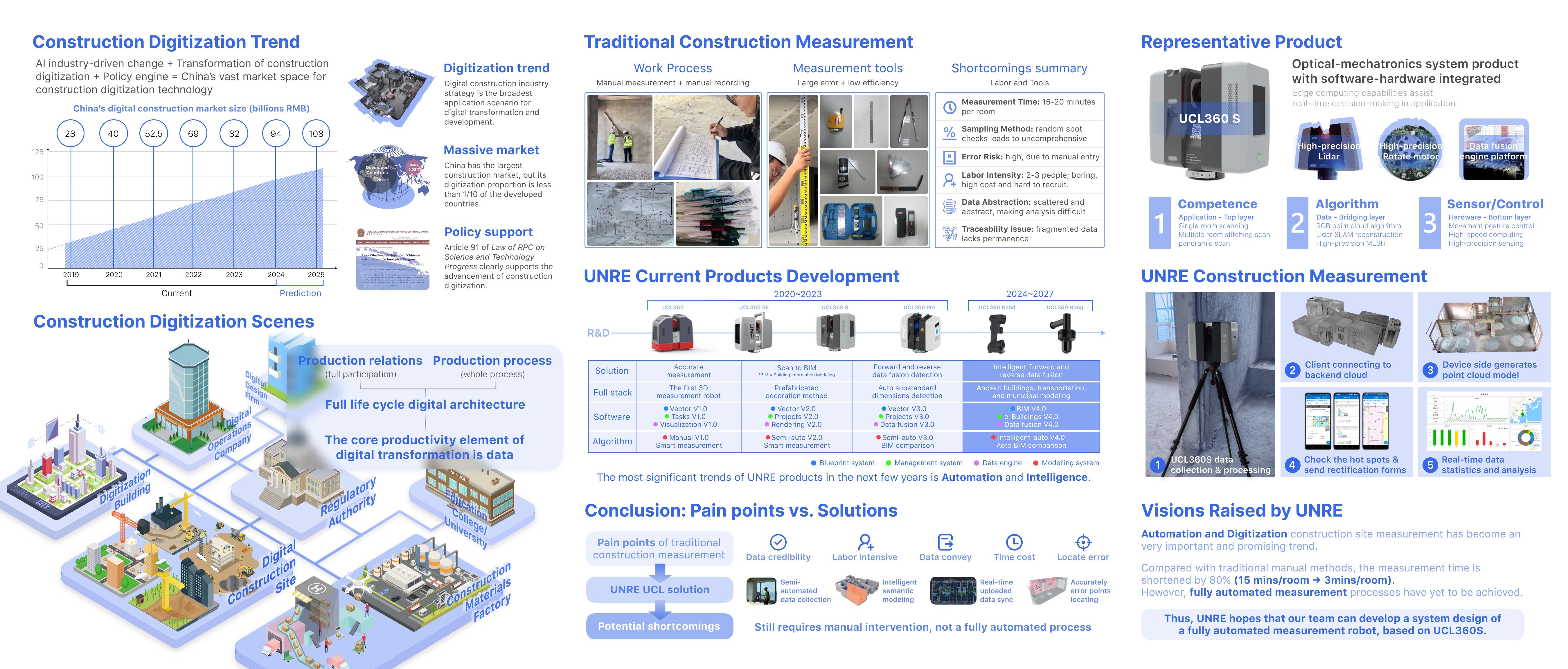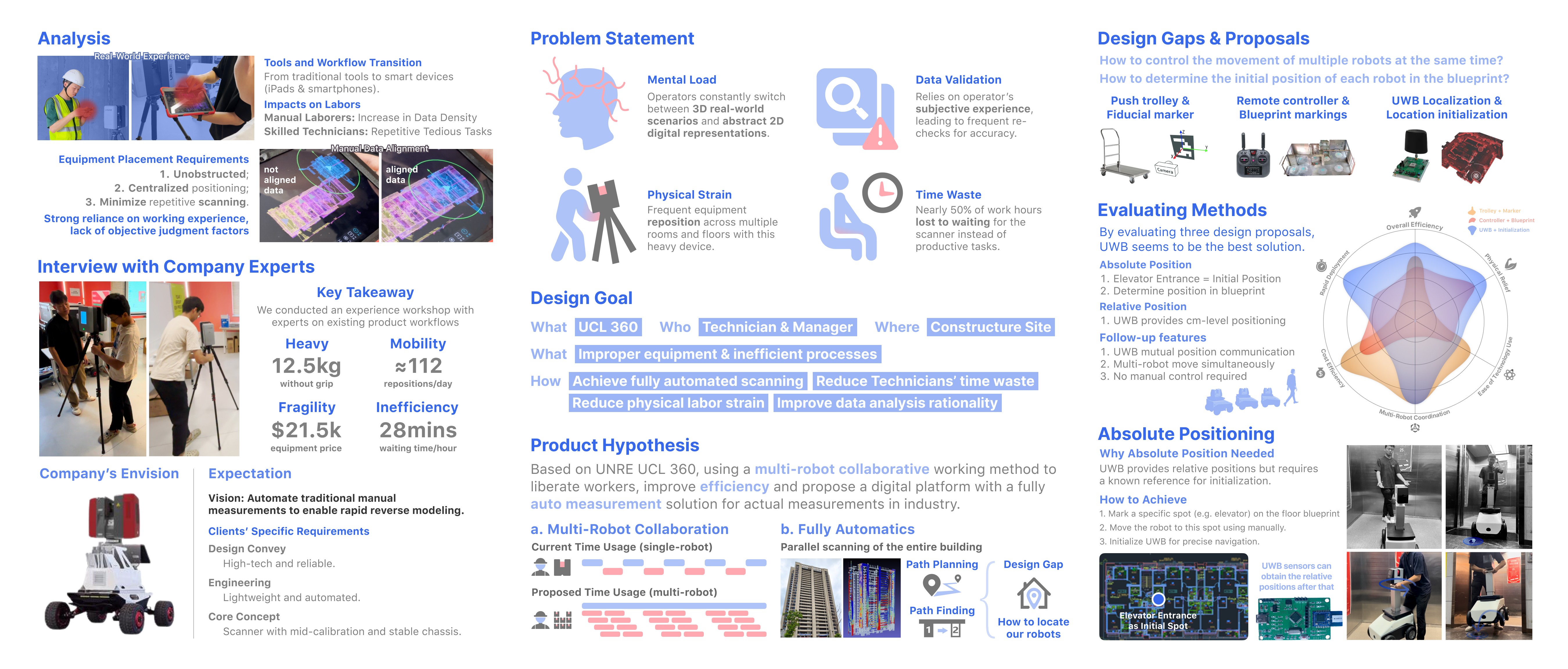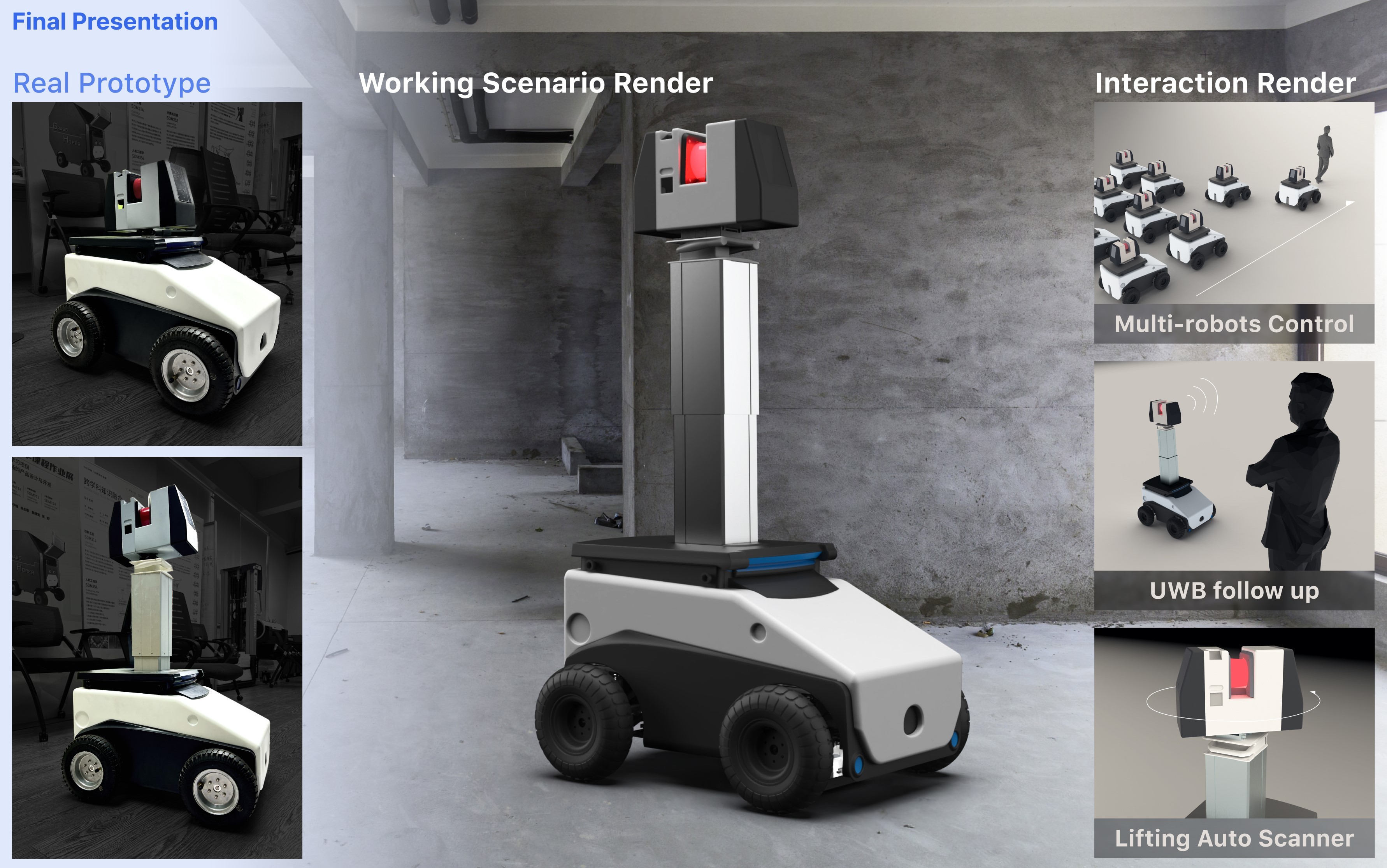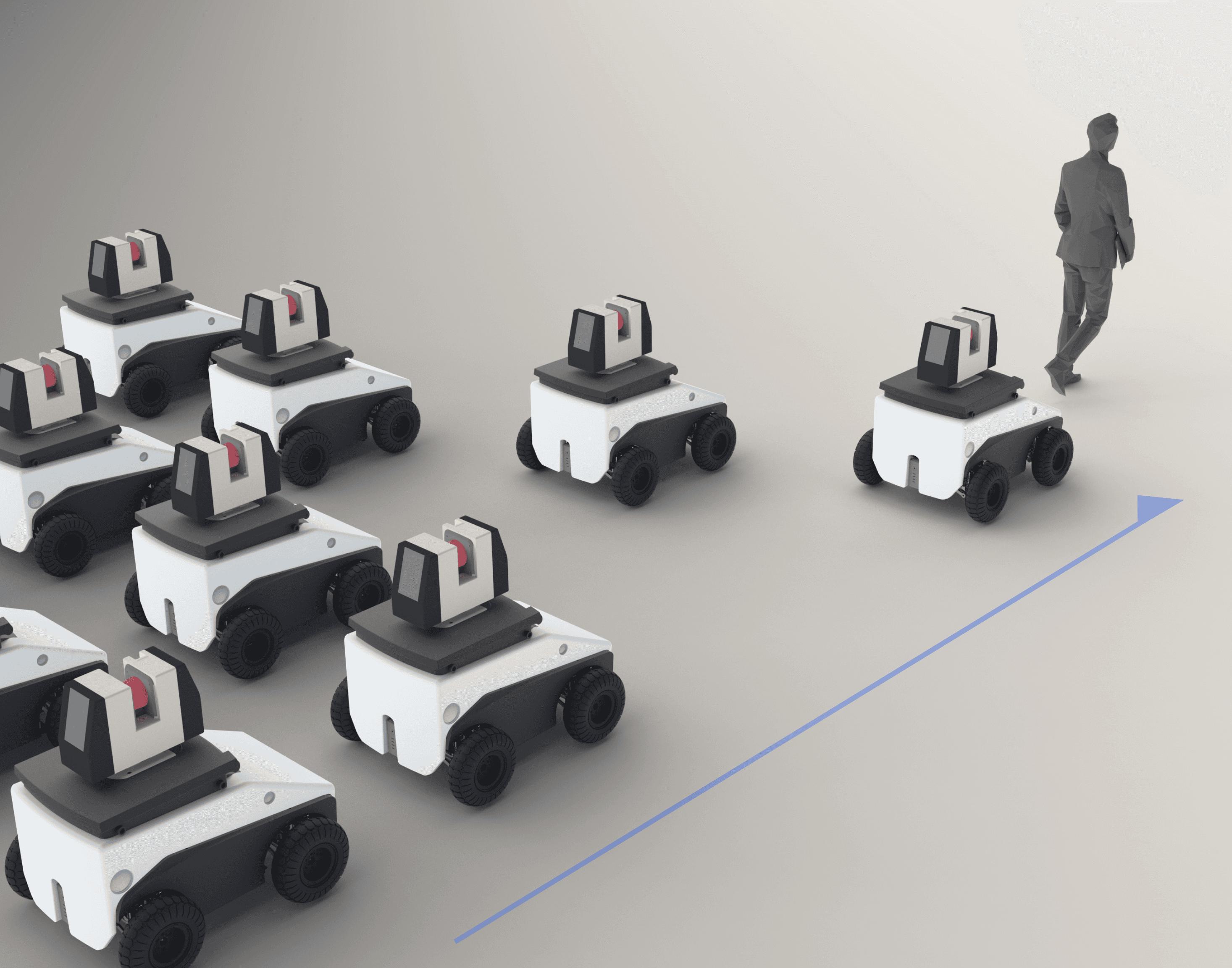


UYCL360 enables fully autonomous 3D scanning and reverse modeling for construction site management. By combining precision, scalability, and human-centered design, UYCL360 transforms labor-intensive processes into seamless, tech-driven workflows.
With features like multi-robot synchronization, centimeter-level localization, and automated navigation, UYCL360 is designed to boost efficiency, reduce physical strain on workers, and enable real-time digital twin creation.
UNRE & AiM (SDIM), SUSTech
Oct. 2023 -
Jan. 2024
Highlight
Contribution Scope
Literature research, User centered product design, UX design, Control Theory, Ergonomic
Skills